MechanismAnalyzer is a numerical simulation and analysis tool for linkage based mechanisms. It allows understanding of how input motions propagate through a mechanism and affect output links across the full range of motion.
The software supports both 2D and 3D mechanisms, with one or more revolute or prismatic input joints. By numerically solving kinematic constraints, it provides insight into motion, sensitivity, and mechanical behavior that is critical during mechanism design and validation.
Revolute Parallel Mechanism
 |
 |
|---|
Prismatic Parallel Mechanism
 |
 |
|---|
MechanismAnalyzer evaluates a mechanism throughout its workspace and generates:
- Input–Output Lookup Tables
- Discrete mappings between input joint values and resulting output link positions
- Useful for control, optimization, and inverse-kinematics applications
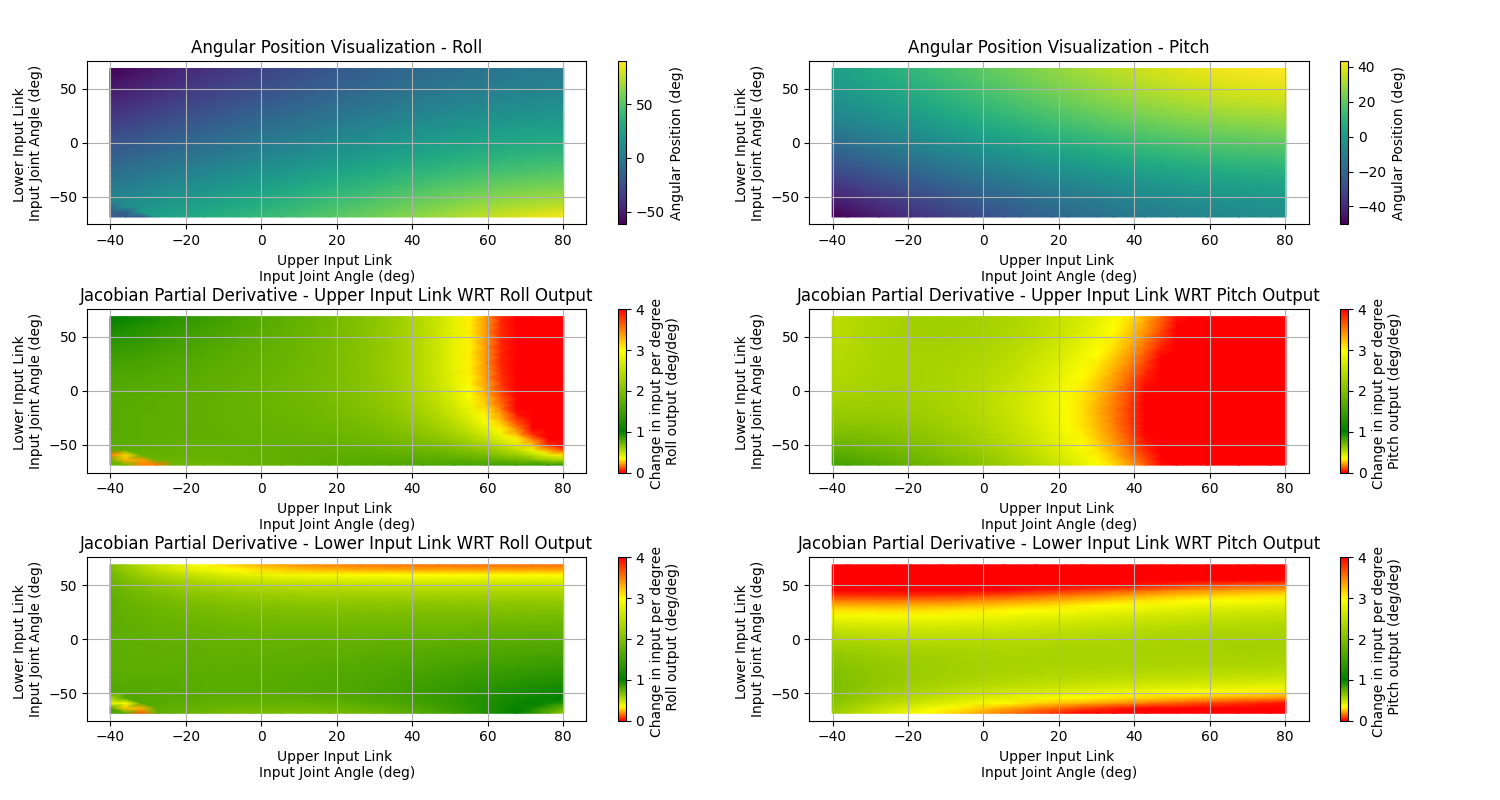
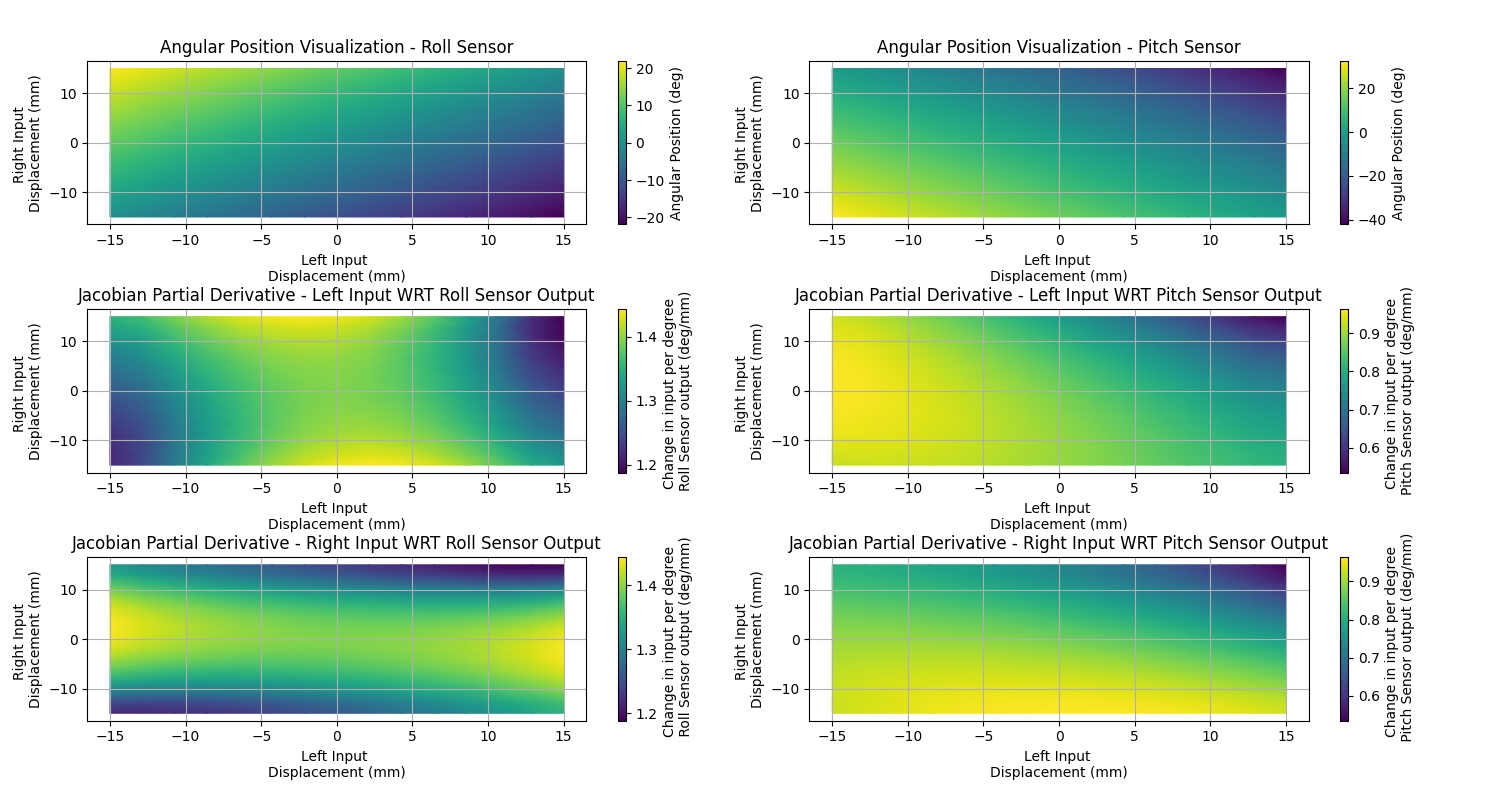
- Position Plots
- Input joint position vs. output link position
- Supports multi-input and multi-output mechanisms
- Jacobian Analysis
- Computation and visualization of the Jacobian matrix: derivatives of output link positions with respect to inputs
- Enables sensitivity analysis, singularity detection, and force/velocity transmission studies
- Mechanism Visualization
- Interactive 2D and 3D visualizations of the mechanism geometry across the full motion range
MechanismAnalyzer uses a numerical constraint-solving approach:
- The input workspace is discretized over the desired range of motion
- Output link positions are solved by:
- Enforcing closed-loop equations
- Applying boundary and joint constraints
- Nonlinear systems of equations are solved at each configuration step
- Jacobians are computed numerically from the resulting kinematic solutions
This approach allows analysis of mechanisms that may be challenging to solve analytically.
- Mechanism design and validation
- Sensitivity and singularity analysis
- Motion transmission studies
- Analysis for robotic systems
- Visualization of kinematics
- Numpy
- Scipy
- pyvista
- contourpy